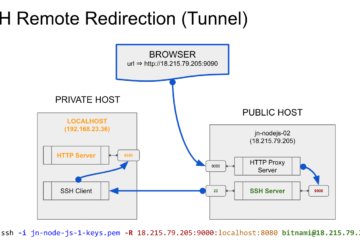
Publicando localhost a Internet con SSH y AWS
4,673 total views
4,673 total views

En nuestra primera entrega sobre este tema discutimos cómo conectar un modem FONA 808 de Adafruit con un ARDUINO UNO para poder realizar operaciones en la red de telefonía movil GSM tales como el envío de mensajes SMS usando una técnica ampliamente difundida denominada comandos AT. En esta segunda entrega discutiremos otras funciones del FONA... » leer más

En la última década se gestó el concepto de Internet de las cosas (IoT por sus siglas en inglés) que prometía una serie de avances tecnológicos donde las cosas cotidianas tendrían acceso a cierta inteligencia y automatización que nos simplificaría aun más la vida. No todo mundo ha escuchado del concepto de Sistemas Cyber-físicos (CPS... » leer más

Una de las principales funcionalidades de un sistema de ejecución de programas para computadora es la gestión de memoria; dentro de este ámbito se encuentra también el proceso de recolección de desechos, es decir, la liberación de memoria utilizada por recursos que ya no se necesitan. En este artículo damos un vistazo a estos procesos... » leer más

Ya sabemos que el mundo está soportado por unas cuantas tecnologías realmente masivas. Una de las más importantes es el formato .CSV (comma separated values). Para quienes trabajan en alguna industria que contribuya masivamente al mundo en alguna forma significativa, probablemente han tenido que trbajar con archivos CSV. Desde la Inteligencia Artificial, tecnologías financieras (FinTech),... » leer más
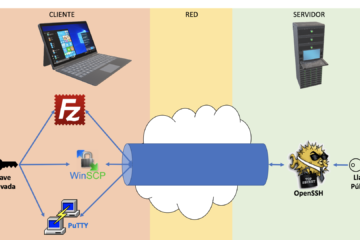
En este artículo exploramos una descripción del protocolo SSH para comunicación cifrada entre computadores, algunas de las principales herramientas de servidor como son OpenSSH y ssh-keygen y algunas herramientas cliente como son PuTTY, PuTTYGen, WinSCP y FileZilla. También exploramos los mecanismos para generar pares de llaves (privada/pública) diferentes protocolos disponibles, formatos de archivos de llave, así como la configuración de las diferentes herramientas para establecer conexiones de tipo terminal y de tipo transferencia de archivos.

Cuatro Manos en el Teclado, No Hace muchos años participaba de un equipo de desarrollo en el que se propuso usar herramientas de tipo VNC para fomentar la programación en parejas. En aquel entonces se pensaba que si las dos personas tenían el mismo acceso al teclado/ratón podrían hacer programación en parejas de forma más... » leer más

Hoy iniciamos una serie de artículos para describir el diseño de un sistema que nos permita realizar una sistema de control parental de computadores basados en imágenes. 4,648 total views

Reuniones y más reuniones Enfrentémoslo, nadie es una isla, y ya pasó hace rato el tiempo en que los logros eran individuales. En la actualidad cualquier logro de alto valor es realizado por equipos multidisciplinarios que mezclan sus talentos, destrezas y conocimientos en hacer que las cosas realmente buenas sucedan. Dicho esto, pensemos todavía un... » leer más
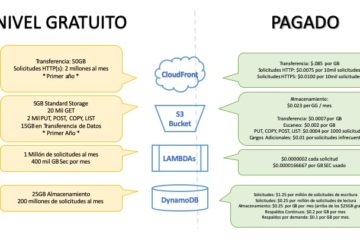
En esta publicación discutiremos algunas ventajas del conjunto de servicios AWS y en especial del paquete de servicios gratuitos. Espero que les sea de utilidad.
La seguridad informática es una de las principales preocupaciones para el intercambio de servicios e información en la Internet, tanto para proveedores de servicios como para los usuarios. ¿Cómo asegurarnos de que el servidor de Internet con el que estamos interactuando es quien dice ser? ¿Cómo le demostramos a nuestros usuarios que nuestros servidores son nuestros? 6,032 total views
Uno de los conceptos más utilizados en el mundo del desarrollo de aplicaciones para Internet es el concepto de ruta. En esta publicación trataremos de explicar de manera resumida dicho concepto. 7,437 total views
El microframework SLIM para PHP provee funcionalidades importantes mediante una librería sencilla. Seguidamente presento algunas notas de cosas que he aprendido recientemente respecto de SLIM. 7,812 total views
PHP es uno de los lenguajes de programación más difundidos en Internet. Al desarrollar una aplicación siempre es importante definir una forma sencilla de manipular u operar datos de una base de datos. En PHP esto se puede hacer de múltiples maneras. Una de ellas es usando la librería phpActiveRecord

En esta entrega exploraremos cómo construir una cámara de seguridad personalizada (que se comporte como yo quiero) usando un Raspberry PI zero (puede ser un Raspberry PI 3 también) y el paquete de código abierto motion.